Nrog rau kev tsim cov khoom siv hlau nplaum tsis tshua muaj hauv ntiaj teb nyob rau xyoo 1970, cov hlau nplaum tsis tshua muaj lub ntiaj teb mus tas li tau los ua. Cov hlau nplaum tas mus li siv cov hlau nplaum tsis tshua muaj hauv ntiaj teb rau kev zoo siab, thiab cov hlau nplaum ruaj khov tuaj yeem tsim cov hlau nplaum ruaj khov tom qab kev sib nqus. Nws cov excitation kev ua tau zoo heev, thiab nws yog superior rau hluav taws xob excitation motors nyob rau hauv cov nqe lus ntawm stability, zoo, thiab poob, uas tau shaken lub tsoos motors lag luam.
Nyob rau hauv xyoo tas los no, nrog kev loj hlob sai ntawm kev tshawb fawb niaj hnub thiab thev naus laus zis, kev ua haujlwm thiab kev siv tshuab ntawm cov khoom siv hluav taws xob, tshwj xeeb tshaj yog cov khoom siv hluav taws xob tsawg hauv ntiaj teb, tau maj mam txhim kho. Ua ke nrog kev txhim kho sai ntawm cov hluav taws xob hluav taws xob, hluav taws xob xa hluav taws xob thiab kev tswj xyuas tsis siv neeg, kev ua haujlwm ntawm cov hlau nplaum ruaj khov synchronous motors tau zoo dua thiab zoo dua.
Tsis tas li ntawd, cov hlau nplaum ruaj khov synchronous motors muaj qhov zoo ntawm lub teeb yuag, qauv yooj yim, me me, cov yam ntxwv zoo thiab lub zog loj. Ntau lub koom haum tshawb fawb thiab kev lag luam tau nquag ua tiav kev tshawb fawb thiab txhim kho cov hlau nplaum ruaj khov synchronous motors, thiab lawv cov chaw thov yuav nthuav dav ntxiv.
1.Kev txhim kho hauv paus ntawm cov hlau nplaum ruaj khov synchronous lub cev muaj zog
a.Kev ua haujlwm siab tsis tshua muaj ntiaj teb cov khoom siv hlau nplaum ruaj khov
Cov khoom siv hlau nplaum tsis tshua muaj hauv ntiaj teb tau dhau los ntawm peb theem: SmCo5, Sm2Co17, thiab Nd2Fe14B. Tam sim no, cov khoom siv hlau nplaum ruaj khov uas sawv cev los ntawm NdFeB tau dhau los ua hom siv dav tshaj plaws ntawm cov khoom siv hlau nplaum ruaj khov hauv ntiaj teb vim lawv cov khoom sib nqus zoo heev. Txoj kev loj hlob ntawm cov khoom siv hlau nplaum ruaj khov tau tsav txoj kev loj hlob ntawm cov hlau nplaum ruaj khov.
Piv nrog rau cov tsoos peb-theem induction lub cev muaj zog nrog hluav taws xob excitation, cov hlau nplaum tas mus li hloov cov hluav taws xob excitation ncej, ua kom yooj yim cov qauv, tshem tawm lub nplhaib plam thiab txhuam ntawm lub rotor, paub txog cov qauv brushless, thiab txo qhov loj ntawm rotor. Qhov no txhim kho lub zog ntom, torque ntom thiab ua haujlwm ua haujlwm ntawm lub cev muaj zog thiab sib zog dua nws cov ntawv thov thiab txhawb kev txhim kho cov hluav taws xob ntawm cov hluav taws xob lub zog.
b.Kev siv txoj kev tswj xyuas tshiab
Nyob rau hauv xyoo tas los no, tswj algorithms tau tsim sai heev. Ntawm lawv, vector tswj algorithms tau daws qhov teeb meem tsav tsheb ntawm AC motors hauv txoj cai, ua AC motors muaj kev tswj xyuas zoo. Qhov tshwm sim ntawm kev tswj torque ncaj qha ua rau cov qauv tswj tau yooj yim dua, thiab muaj cov yam ntxwv ntawm kev ua haujlwm zoo hauv Circuit Court rau kev hloov pauv thiab ceev torque dynamic teb ceev. Indirect torque tswj tshuab daws qhov teeb meem ntawm qhov loj torque pulsation ntawm ncaj qha torque ntawm qis ceev, thiab txhim kho qhov ceev thiab tswj qhov tseeb ntawm lub cev muaj zog.
c.Kev siv cov khoom siv hluav taws xob ua haujlwm siab thiab cov txheej txheem
Lub zog hluav taws xob niaj hnub siv tshuab hluav taws xob yog qhov tseem ceeb ntawm kev sib txuas ntawm cov ntaub ntawv kev lag luam thiab kev lag luam ib txwm muaj, thiab tus choj ntawm qhov tsis muaj zog tam sim no thiab tswj tau muaj zog tam sim no. Kev txhim kho ntawm lub zog hluav taws xob thev naus laus zis ua rau kev ua tiav ntawm cov tswv yim tswj kev tsav tsheb.
Nyob rau xyoo 1970, muaj ntau lub hom phiaj inverters tau tshwm sim, uas tuaj yeem hloov pauv lub zog muaj zog rau hauv lub zog sib txawv ntawm lub zog nrog kev hloov kho tsis tu ncua, yog li tsim cov xwm txheej rau kev hloov pauv ceev ntawm AC zog. Cov inverters no muaj peev xwm pib muag tom qab qhov zaus tau teeb tsa, thiab qhov zaus tuaj yeem nce los ntawm xoom mus rau qhov teeb tsa zaus ntawm ib tus nqi, thiab tus nqi nce tuaj yeem hloov kho tsis tu ncua nyob rau hauv ntau yam, daws qhov teeb meem pib ntawm synchronous motors.
2.Txoj kev loj hlob ntawm cov hlau nplaum ruaj khov synchronous motors hauv tsev thiab txawv teb chaws
Thawj lub cev muaj zog hauv keeb kwm yog lub tshuab hlau nplaum ruaj khov. Lub sijhawm ntawd, kev ua haujlwm ntawm cov khoom siv hlau nplaum ruaj khov yog qhov tsis zoo, thiab lub zog quab yuam thiab kev ua haujlwm ntawm cov hlau nplaum ruaj khov tau qis dhau, yog li lawv tau hloov sai sai los ntawm cov hluav taws xob excitation motors.
Nyob rau xyoo 1970, cov khoom siv hlau nplaum tsis tshua muaj hauv ntiaj teb uas sawv cev los ntawm NdFeB muaj kev quab yuam zoo, kev ua kom rov zoo, muaj peev xwm demagnetization muaj zog thiab cov khoom siv hluav taws xob loj, uas ua rau lub zog muaj zog ruaj khov hlau nplaum synchronous motors tshwm nyob rau theem ntawm keeb kwm. Tam sim no, kev tshawb fawb ntawm cov hlau nplaum ruaj khov synchronous motors tau dhau los ua neeg paub tab, thiab tab tom txhim kho mus rau kev kub ceev, siab torque, siab zog thiab kev ua haujlwm siab.
Nyob rau hauv xyoo tas los no, nrog rau kev nqis peev zoo ntawm cov kws tshawb fawb hauv tsev thiab tsoomfwv, cov hlau nplaum ruaj khov synchronous motors tau tsim sai heev. Nrog rau txoj kev loj hlob ntawm microcomputer technology thiab tsis siv neeg tswj tshuab, mus tas li hlau nplaum synchronous motors tau lug siv nyob rau hauv ntau yam teb. Vim muaj kev vam meej hauv zej zog, tib neeg cov kev xav tau rau cov hlau nplaum ruaj khov synchronous motors tau dhau los ua nruj dua, ua rau cov hlau nplaum ruaj khov rau kev txhim kho mus rau qhov loj dua kev tswj hwm ntau dua thiab siab dua precision tswj. Vim yog kev txhim kho ntawm cov txheej txheem tsim khoom tam sim no, cov khoom siv hlau nplaum ruaj khov ua haujlwm tau raug tsim kho ntxiv. Qhov no txo nws cov nqi thiab maj mam siv nws rau ntau yam kev ua neej.
3. Kev siv tshuab tam sim no
a. Permanent magnet synchronous motor tsim tshuab
Piv nrog rau cov tshuab hluav taws xob zoo tib yam, cov hlau nplaum ruaj khov synchronous lub cev muaj zog tsis muaj hluav taws xob excitation windings, cov khoom siv hluav taws xob thiab cov khoom siv excitation, uas zoo heev tsis yog tsuas yog kev ruaj ntseg thiab kev ntseeg siab, tab sis kuj ua haujlwm zoo.
Ntawm lawv, ua-nyob ruaj khov cov hlau nplaum cov motecet muaj qhov zoo, muaj zog tsis muaj zog ntawm kev ua kom zoo dua qub, ua rau lawv xaiv qhov zoo tshaj plaws rau kev tsav tsheb.
Cov hlau nplaum tas mus li muab tag nrho cov kev sib nqus sib nqus ntawm cov hlau nplaum tas mus li, thiab cogging torque yuav ua rau muaj kev vibration thiab suab nrov ntawm lub cev muaj zog thaum ua haujlwm. Ntau dhau ntawm cogging torque yuav cuam tshuam rau qhov kev ua haujlwm qis ntawm lub cev muaj zog tswj qhov system thiab qhov siab-precision positioning ntawm txoj haujlwm tswj qhov system. Yog li ntawd, thaum tsim lub cev muaj zog, lub cogging torque yuav tsum tau txo kom ntau li ntau tau los ntawm lub cev muaj zog optimization.
Raws li kev tshawb fawb, cov txheej txheem dav dav los txo cov cog torque suav nrog kev hloov cov ncej arc coefficient, txo qhov dav ntawm lub stator, sib piv cov skew qhov thiab ncej qhov, hloov txoj hauj lwm, qhov loj thiab cov duab ntawm cov ncej hlau nplaum, thiab lwm yam. Txawm li cas los xij, nws yuav tsum tau muab sau tseg tias thaum txo cov cog torque, nws yuav cuam tshuam rau lwm yam kev ua haujlwm ntawm lub cev muaj zog, xws li electromagnetic torque. Yog li ntawd, thaum tsim, ntau yam yuav tsum tau sib npaug ntau npaum li qhov ua tau kom ua tiav lub cev muaj zog zoo tshaj plaws.
b.Permanent magnet synchronous motor simulation technology
Lub xub ntiag ntawm cov hlau nplaum ruaj khov nyob rau hauv cov hlau nplaum ruaj khov ua rau nws nyuaj rau cov neeg tsim qauv los xam cov kev tsis sib xws, xws li kev tsim cov khoom tsis muaj dej ntws tawm coefficient thiab ncej arc coefficient. Feem ntau, finite element tsom xam software yog siv los xam thiab optimize cov tsis tau mus tas li hlau nplaum motors. Finite element tsom xam software tuaj yeem xam lub cev muaj zog tsis zoo, thiab nws yog qhov zoo heev los siv nws los txheeb xyuas qhov cuam tshuam ntawm lub cev muaj zog ntawm kev ua haujlwm.
Txoj kev suav cov ntsiab lus finite ua rau nws yooj yim dua, sai dua thiab raug dua rau peb los xam thiab txheeb xyuas cov hluav taws xob hluav taws xob ntawm cov motors. Qhov no yog ib txoj kev ua lej tsim los ntawm kev sib txawv thiab tau siv dav hauv science thiab engineering. Siv cov kev ua lej los txiav txim siab qee qhov kev daws teeb meem txuas ntxiv mus rau hauv pawg ntawm cov chav nyob, thiab tom qab ntawd sib cuam tshuam hauv txhua chav. Nyob rau hauv no txoj kev, ib tug linear interpolation muaj nuj nqi yog tsim, uas yog, ib tug approximate muaj nuj nqi yog simulated thiab soj ntsuam siv finite ntsiab, uas tso cai rau peb intuitively soj ntsuam cov kev taw qhia ntawm magnetic teb kab thiab kev faib ntawm magnetic flux ntom nyob rau hauv lub cev muaj zog.
c.Permanent hlau nplaum synchronous lub cev muaj zog tswj tshuab
Kev txhim kho kev ua haujlwm ntawm lub cev muaj zog tsav tsheb kuj tseem ceeb heev rau kev txhim kho kev lag luam tswj kev lag luam. Nws ua rau lub kaw lus tau tsav ntawm qhov ua tau zoo tshaj plaws. Nws cov yam ntxwv tseem ceeb yog xav txog qhov ceev ceev, tshwj xeeb tshaj yog nyob rau hauv cov ntaub ntawv ntawm kev pib sai, zoo li qub acceleration, thiab lwm yam, nws muaj peev xwm tso tawm ib tug loj torque; thiab thaum tsav tsheb ntawm kev kub ceev, nws tuaj yeem ua tiav lub zog ceev ceev tswj nyob rau hauv ntau yam. Table 1 piv cov kev ua tau zoo ntawm ob peb lub cev muaj zog loj.
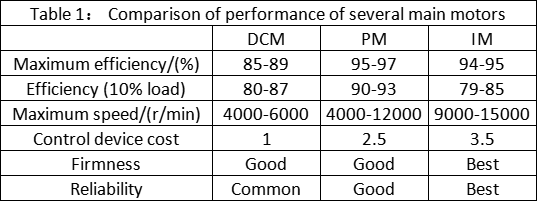
Raws li tau pom los ntawm Table 1, cov hlau nplaum ruaj khov motors muaj kev ntseeg tau zoo, ntau yam ceev thiab ua haujlwm siab. Yog tias ua ke nrog cov txheej txheem tswj hwm, tag nrho lub cev muaj zog tuaj yeem ua tiav qhov kev ua tau zoo tshaj plaws. Yog li ntawd, nws yog ib qho tsim nyog yuav tau xaiv qhov tsim nyog tswj algorithm kom ua tiav cov kev cai ceev ceev, kom lub cev muaj zog tsav tuaj yeem ua haujlwm nyob rau hauv qhov kev tswj hwm qhov dav dav thiab lub zog tas li.
Txoj kev tswj vector yog dav siv nyob rau hauv cov hlau nplaum ruaj khov tsav ceev tswj algorithm. Nws muaj qhov zoo ntawm cov kev cai dav dav, kev ua haujlwm siab, kev ntseeg siab, kev ruaj ntseg zoo thiab kev lag luam zoo. Nws yog dav siv nyob rau hauv lub cev muaj zog tsav, rail tsheb thauj mus los thiab tshuab cuab yeej servo. Vim muaj kev siv sib txawv, tam sim no vector tswj lub tswv yim saws kuj txawv.
4.Cov yam ntxwv ntawm cov hlau nplaum ruaj khov synchronous lub cev muaj zog
Cov hlau nplaum ruaj khov synchronous lub cev muaj zog muaj cov qauv yooj yim, tsis tshua muaj kev poob siab thiab lub zog loj. Piv nrog rau cov hluav taws xob excitation lub cev muaj zog, vim tias tsis muaj txhuam, commutators thiab lwm yam khoom siv, tsis muaj reactive excitation tam sim no, yog li cov stator tam sim no thiab tsis kam poob yog me me, efficiency siab dua, lub excitation torque loj dua, thiab kev tswj kev ua tau zoo dua. Txawm li cas los xij, muaj qhov tsis zoo xws li tus nqi siab thiab nyuaj rau kev pib. Vim yog daim ntawv thov kev tswj hwm thev naus laus zis hauv lub cev muaj zog, tshwj xeeb tshaj yog cov ntawv thov kev tswj hwm vector, cov hlau nplaum ruaj khov synchronous motors tuaj yeem ua tiav ntau yam kev tswj ceev, cov lus teb ceev ceev thiab siab-precision positioning tswj, yog li cov hlau nplaum ruaj khov synchronous motors yuav nyiam ntau tus neeg los ua kev tshawb fawb dav.
5.Technical yam ntxwv ntawm Anhui Mingteng mus tas li hlau nplaum synchronous lub cev muaj zog
a. Lub cev muaj zog muaj lub zog loj thiab muaj txiaj ntsig zoo ntawm daim phiaj hluav taws xob. Tsis tas yuav tsum muaj lub tshuab hluav taws xob them nyiaj, thiab lub peev xwm ntawm cov khoom siv hluav taws xob tuaj yeem siv tau tag nrho;
b. Cov hlau nplaum ruaj khov lub cev muaj zog zoo siab los ntawm cov hlau nplaum ruaj khov thiab ua haujlwm synchronously. Tsis muaj kev ceev pulsation, thiab cov kav dej kuj tsis muaj zog ntxiv thaum tsav cov kiv cua thiab cov twj tso kua mis;
c. Cov hlau nplaum ruaj khov lub cev muaj zog tuaj yeem tsim nrog siab pib torque (ntau tshaj 3 zaug) thiab muaj peev xwm ntau dhau raws li qhov xav tau, yog li daws qhov tshwm sim ntawm "tus nees loj rub lub laub";
d. Lub reactive tam sim no ntawm cov asynchronous lub cev muaj zog yog feem ntau txog 0.5-0.7 npaug ntawm cov ntsuas tam sim no. Mingteng mus tas li hlau nplaum synchronous lub cev muaj zog tsis xav tau excitation tam sim no. Lub reactive tam sim no ntawm cov hlau nplaum ruaj khov lub cev muaj zog thiab lub cev muaj zog asynchronous yog li 50% sib txawv, thiab qhov kev ua haujlwm tam sim no yog li 15% qis dua li ntawm asynchronous motor;
e. Lub cev muaj zog tuaj yeem tsim los pib ncaj qha, thiab qhov loj me ntawm kev teeb tsa sab nraud yog tib yam li cov tam sim no siv asynchronous motors, uas tuaj yeem hloov pauv cov motors asynchronous;
f. Ntxiv ib tus neeg tsav tsheb tuaj yeem ua tiav qhov pib muag muag, muag muag, thiab kev tswj tsis tau nrawm, nrog cov lus teb zoo dynamic thiab txhim kho lub zog txuag ntxiv;
g. Lub cev muaj zog muaj ntau cov qauv topological, uas ncaj qha ua tau raws li qhov yuav tsum tau ua ntawm cov cuab yeej siv tshuab nyob rau hauv ntau yam thiab nyob rau hauv huab cua txias;
h. Txhawm rau txhim kho kev ua haujlwm ntawm lub cev, ua kom luv cov saw hlau sib kis, thiab txo cov nqi kho mob, siab thiab qis ceev ncaj qha tsav hlau nplaum synchronous motors tuaj yeem tsim thiab tsim kom tau raws li cov neeg siv khoom xav tau ntau dua.
Anhui Mingteng Permanent-Magnetic Machinery & Hluav Taws Xob Khoom Co., Ltd.https://www.mingtengmotor.com/) tau tsim nyob rau hauv 2007. Nws yog ib tug high-tech enterprise specializing nyob rau hauv kev tshawb fawb thiab kev loj hlob, ntau lawm thiab muag khoom ntawm ultra-high efficiency mus tas li hlau nplaum synchronous motors. Lub tuam txhab siv niaj hnub tsim qauv kev xav, kev tsim software thiab tus kheej tsim cov hlau nplaum ruaj khov lub cev muaj zog tsim kev pab cuam los simulate electromagnetic teb, kua teb, kub teb, kev ntxhov siab, thiab lwm yam.
Copyright: Kab lus no yog rov luam tawm ntawm WeChat pej xeem tus xov tooj "Motor Alliance", qhov txuas thawjhttps://mp.weixin.qq.com/s/tROOOkT3pQwZtnHJT4Ji0Cg
Kab lus no tsis sawv cev rau peb lub tuam txhab txoj kev xav. Yog tias koj muaj kev xav lossis kev xav, thov kho peb!
Post lub sij hawm: Sep-14-2024